Metody Minimalizacji Schematów Blokowych
W analizie układów regulacji redukcja złożonych, wielopętlowych struktur blokowych do pojedynczej transmitancji wypadkowej jest niezbędna do dalszego badania stabilności. Klasyczne przekształcenia krok po kroku są podatne na błędy rachunkowe, dlatego podstawowym narzędziem inżynierskim staje się Reguła Wzmocnień Masona.
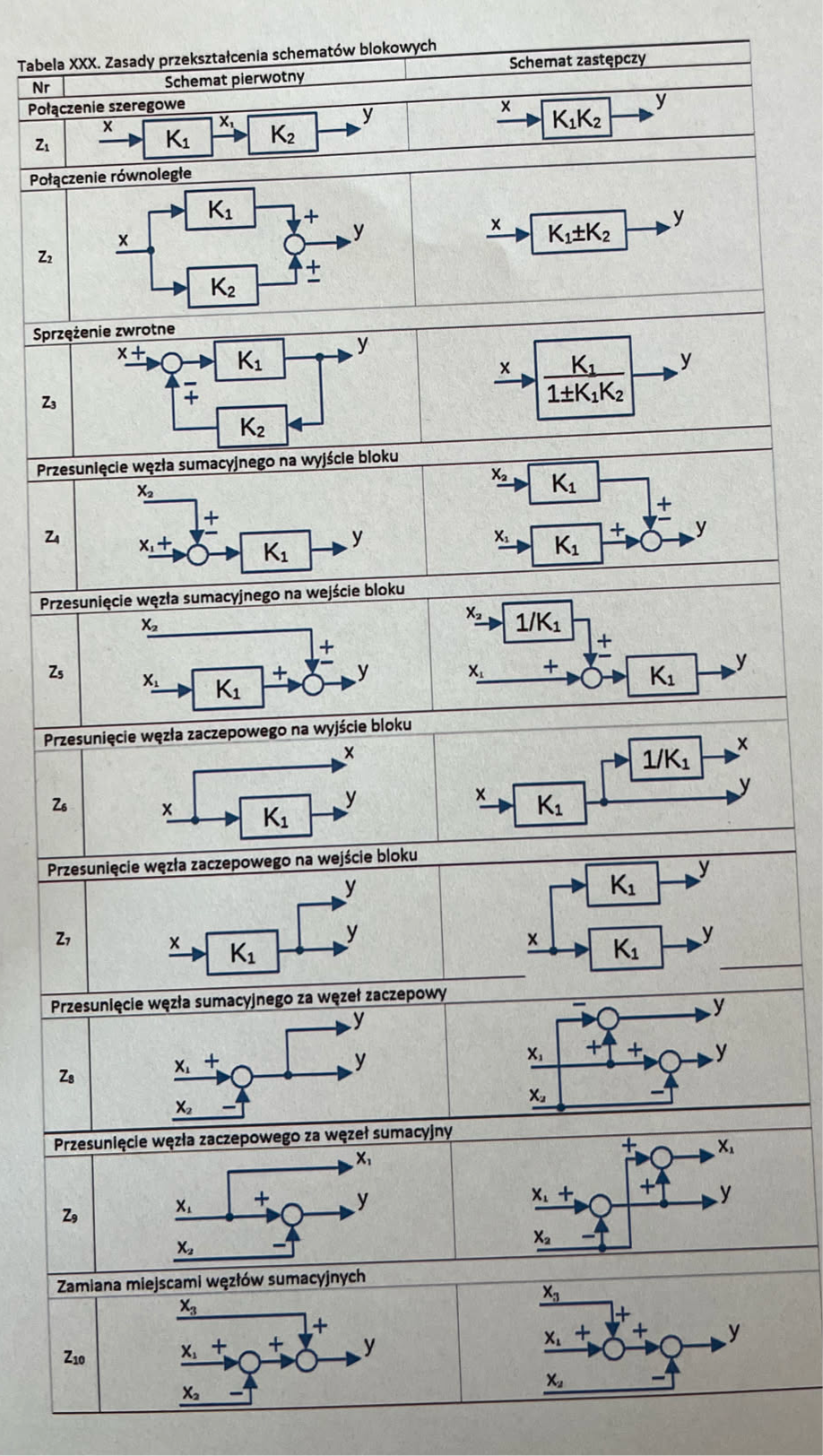
0. Tabelka
1. Reguła Wzmocnień Masona
Reguła Masona pozwala na wyznaczenie transmitancji zastępczej $G(s) = \frac{Y(s)}{X(s)}$ bezpośrednio na podstawie analizy ścieżek i pętli występujących w układzie.
Definicje składników wzoru:
- $P_k$ – Ścieżka bezpośrednia (wprost): Iloczyn wzmocnień bloków wzdłuż drogi prowadzącej od wejścia $X(s)$ do wyjścia $Y(s)$, która nie przechodzi przez żaden sumator ani węzeł zaczepienia dwukrotnie.
- $L_i$ – Wzmocnienie pętli: Iloczyn wzmocnień wszystkich bloków znajdujących się wewnątrz zamkniętej pętli. Uwaga: Należy bezwzględnie uwzględnić znak sprzężenia zwrotnego z sumatora (ujemne sprzężenie wprowadza znak minus).
- $\Delta$ – Wyznacznik główny układu: Określany strukturą pętli w
układzie:
$$\Delta = 1 - \sum_{i} L_i + \sum_{i,j} L_i L_j - \sum_{i,j,k} L_i L_j L_k + \dots$$Gdzie $\sum L_i L_j$ to suma iloczynów par pętli, które nie mają ani jednego wspólnego węzła (są całkowicie niezależne geometrycznie).
- $\Delta_k$ – Wyznacznik ścieżki: Wartość wyznacznika $\Delta$ obliczona dla podukładu powstałego po usunięciu z grafu $k$-tej ścieżki bezpośredniej (bierzemy pod uwagę tylko pętle, które nie stykają się z tą ścieżką).
2. Przykład 1: Klasyczna pojedyncza pętla sprzężenia
Rozważmy podstawowy układ z ujemnym sprzężeniem zwrotnym:
[Sprzężenie zwrotne pobrane z Y(s) wraca przez blok H(s) ze znakiem minus do sumatora]
Wyznaczenie transmitancji krok po kroku:
- Ścieżka bezpośrednia: Istnieje tylko jedna droga od wejścia do wyjścia: $P_1 = G_0(s)$.
- Pętla sprzężenia: Układ posiada jedną pętlę wracającą przez sumator ze znakiem minus: $L_1 = -G_0(s)H(s)$.
- Wyznacznik główny: Ponieważ jest tylko jedna pętla: $\Delta = 1 - L_1 = 1 - (-G_0(s)H(s)) = 1 + G_0(s)H(s)$.
- Wyznacznik ścieżki: Ścieżka $P_1$ dotyka jedynej pętli układu, zatem po jej usunięciu nie zostaje żadna pętla: $\Delta_1 = 1$.
Podstawiając do wzoru Masona, otrzymujemy klasyczną strukturę układu zamkniętego:
3. Przykład 2: Złożony układ wielopętlowy
Analiza struktury, w której pętle nakładają się na siebie:
Rozważmy układ posiadający dwie ścieżki bezpośrednie dzielące wspólne bloki: $P_1 = K_1 K_2 K_4$ oraz $P_2 = K_1 K_3 K_4$. Układ objęty jest trzema ujemnymi sprzężeniami zwrotnymi, tworzącymi pętle:
- $L_1 = -K_1 K_2 K_4 H_1$
- $L_2 = -K_1 K_3 K_4 H_1$
- $L_3 = -K_2 H_2$
Wyznaczenie wyznacznika głównego $\Delta$:
Wszystkie trzy pętle $L_1, L_2, L_3$ przechodzą przez wspólny blok $K_2$ lub sumatory (stykają się). Oznacza to, że nie ma par pętli niezależnych. Człony typu $L_i L_j$ zerują się:
Wyznaczenie transmitancji zastępczej:
Zarówno ścieżka $P_1$ jak i $P_2$ dotykają wszystkich pętli w układzie, co daje $\Delta_1 = 1$ oraz $\Delta_2 = 1$. Ostateczna postać transmitancji zastępczej wynosi: